
上期内容我们聊了光电传感器,能看出光电类传感器的应用确实是非常广泛。比如基恩士的PZ系列,已经应用在了很多的自动化设备上。
但是,由于设备场景的多样性和复杂性,光电并不能完美地适配所有检测需求。
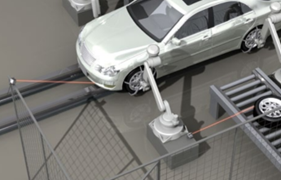
例如,对于如下这些检测表面比较特殊的工件,如果使用反射型光电传感器,就会容易受到产品颜色及检测角度等因素的影响,导致误检测的发生。

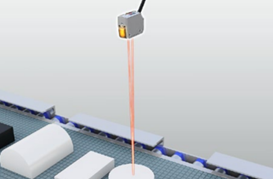
或者遇到如下这种无法安装对射型传感器的情况,反射型光电传感器就很难实现稳定检测了。
那么怎么解决这些场景下的检测问题呢?
→这个时候,就需要用到激光传感器了。
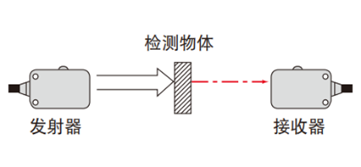
①对射原理:如果有物体挡住光轴,则受光端接收到的光亮值会降低。
那么激光传感器的构造和原理是怎么样呢?
①激光发射器:是产生激光束的部件,通常采用半导体激光器等,为测量提供稳定的光源。
② 激光检测器:负责接收经被测物体反射或散射的激光信号,并将光信号转换为电信号,常用的是CMOS感光元件。
③测量电路:对激光检测器转换后的电信号进行处理和分析,得出被测物体的位移或距离信息。
④ 光学系统:通常由透镜、反射镜等光学元件组成,负责发射和接收回光。
构造部分和光电传感器的区别在于:
①发光部使用半导体激光发射器,光斑又小又亮,可以做到远距离高精度检测。
②接收部使用了和光电不同的CMOS感光原件,不易受到反光量的干扰。
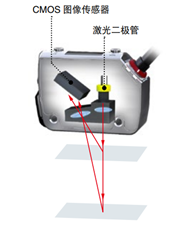
①基恩士的LR-X、LR-Z系列采用的是三角测距的原理:
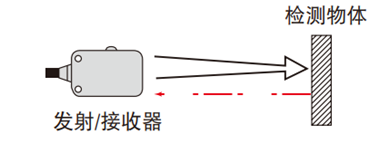
激光由发射器发出,接收器的CMOS 图像传感器接收到工件反射回来的激光。一旦传感器与工件的距离发生改变,在CMOS 图像传感器上接收的位置也会随之改变,可通过该位置计算出工件的距离与变化,如下图所示。

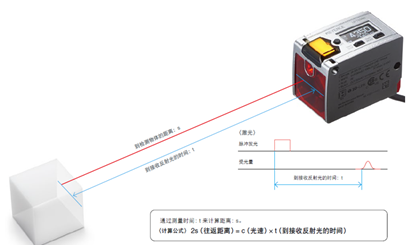
TOF是“Time of Flight”的简称,指计算激光照射到工件后返回的时间,并换算成距离。
原因如下:
①激光传感器基于激光测距的原理,本身不易受到被测物体表面特性、颜色、角度等因素的影响。
②反射型的光电传感器基于反射光量来判断,物体的颜色、透明度、表面粗糙度等属性变化都可能导致光的吸收、反射和散射特性改变,进而影响测量精度和稳定性。
相信通过这期内容,大家对于激光传感器已经有了较为全面的认识。
基恩士在激光传感器方面也已经有了更高的突破。这里向大家介绍LR-X系列,既能以超小体积的机身应对各类复杂的安装需求,同时又具有超高的性能以应对各类复杂的检测场景。