为探索移动扫描和移动激光扫描技术在道路检测测量中的应用,近日,三点公司与相关客户单位在上海针对MX50车载扫描进行了项目实践,涉及了设备组装,点云扫描,数据处理等一整套流程技术交流。
一 项目概况
本项目主要目的是获取蕰川公路部分路段带有绝对坐标的点云数据,并提取道路中心线、边线及断面等路面信息。项目位于上海市宝山区,蕰川公路与沪太公路的交叉路口至蕰川公路与川纪路交叉口的路段,全长6.375公里,吴淞高程在3-4米之间。
二 准备工作 MX50移动测绘解决方案、R12i GNSS接收机 MX50扫描作业的目的:获取高精度的带有绝对坐标的点云,可以扩展其他用途。
R12i GNSS接收机作业的目的:平面控制测量/架设R12i开启静态测量。
在正式作业前,三点公司技术人员将MX50的组装过程以及所需注意事项进行了认真的学习和练习,以确保本次项目顺利完成。
三 作业方式
在外业实施过程中,扫描作业与控制测量作业同步进行,但扫描作业较快,控制测量作业较慢。项目实施步骤如下: ①控制点布设:在目标路段两侧的应急车道上选择控制点点位,相邻控制点点位之间的距离应在200m左右,点位相对位置要满足导线测量时能够通视。点位选好后应做点位命名及点位标记,点位标记可用于扫描识别、导线测量及水准测量,点位标记样式具体要求:在控制点点位绘制一个边长为50cm“田”字格,用黑、白油漆相间地填充“田”字格,在“田”字格中心位置订上十字钉。目标路段控制点点位选完后即可进行扫描作业和控制测量作业。点位标记如下图:
②GNSS静态测量:在首级控制点上架设R12i并开启基站GNSS静态测量,用于内业惯导轨迹处理。
③扫描作业:扫描车在行驶的过程中,扫描仪可快速扫描公路及两侧的地形,以相对坐标点云的形式记录。
四 后处理作业 外业作业完成后将我们所有的数据导入TBC 当需要绝对坐标的点云时,我们可以通过地理坐标转换的方式获取到绝对坐标的点云。根据获取的点云我们可以:制作全国区域的用于自动驾驶导航的高精路网地图;制作公路的横、纵断面图,辅助公路的养护、维修与改造;制作城市路网和建筑的模型,将模型作为底图叠加到管线图上,辅助调查地下管线或其他地下空间等各种用途。 从设备中导出点云、影像和轨迹数据,导入TBC。
仪器拍摄全景视角 ↓ ↓ ↓
全景图叠加点云 ↓ ↓ ↓
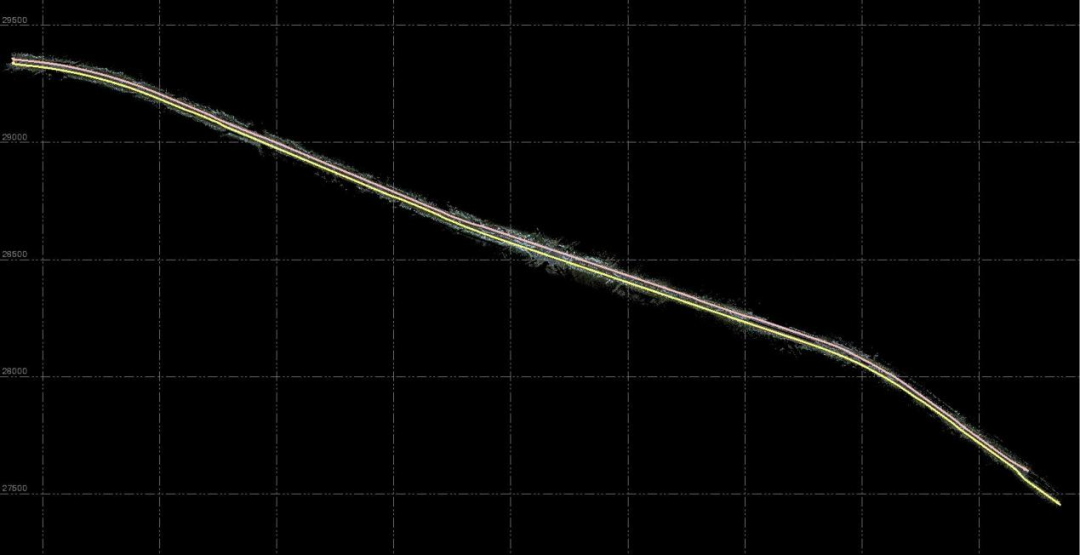
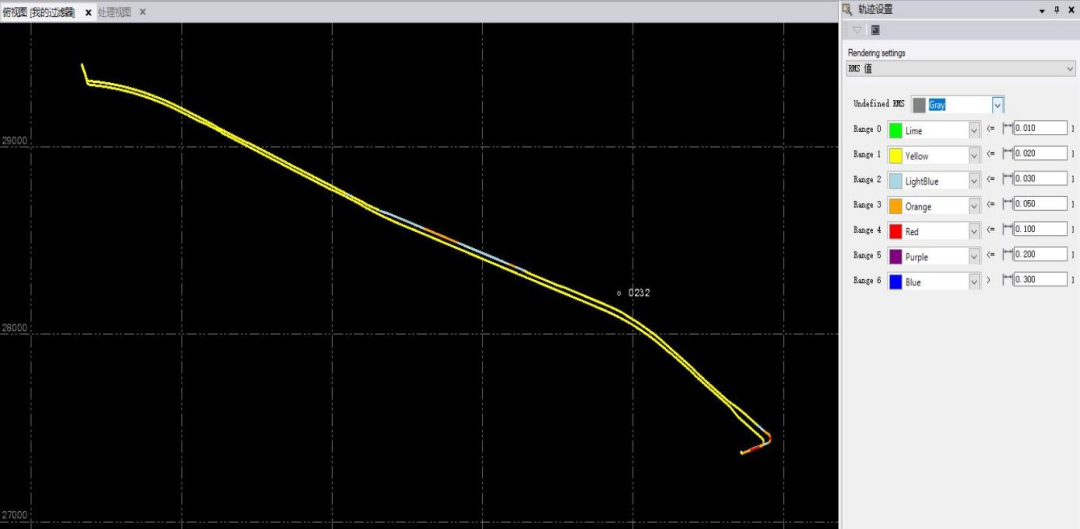
基站GNSS静态数据与移动扫描GNSS数据进行联合处理,获取移动扫描轨迹。
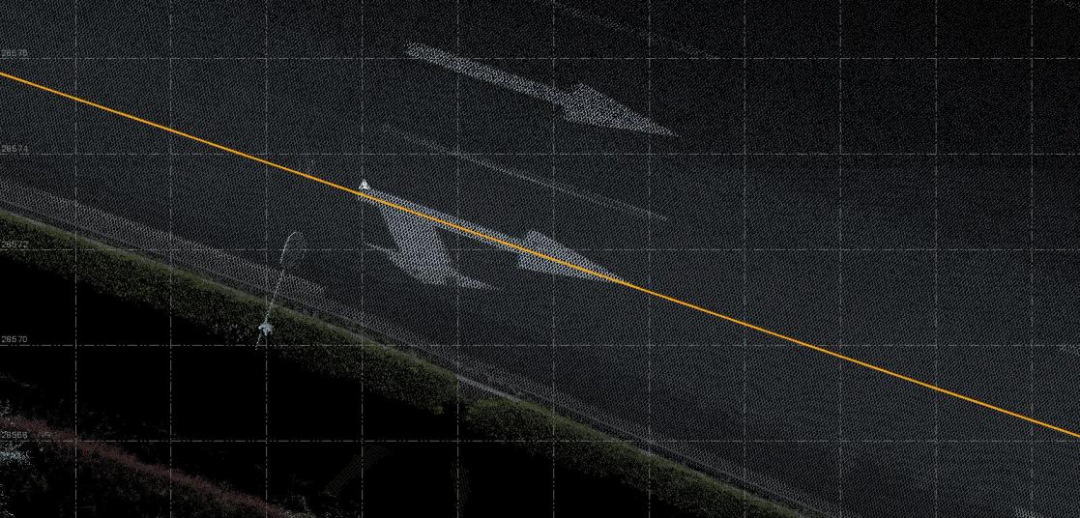
将点云/影像与控制点进行匹配,软件将自动进行地理坐标转换,获取绝对坐标点云。
点云配准后的检查点精度表: 控制点间距1000m-1200m,满足高程精度6公分以内: 控制点间距600-800m,满足高程精度4公分以内: 控制点间距400-500m,满足高程精度2.5公分以内:
五 MX50特点
无论您是希望提高移动影像工作效率的新用户,还是希望设备具有更多功能的移动绘图专家,Trimble MX50 均可在不同的应用场景提供可靠的交付成果。 ►移动测绘系统,将精确的LiDAR数据和沉浸式全景影像结合在一起 ►Trimble最先进的 LiDAR技术,集成到成熟可靠的移动平台中 ►精确的点云,用于路面、高速公路养护等应用 ►简单易行的系统安装和基于浏览器的直观操作 ►天宝的内、外业一体化完整工作流程 —–采集、处理、提取、发布 ►成熟的天宝移动影像测绘软件工作流程