

移动测绘系统飞速增长的应用在整个行业都有目共睹。Trimble公司凭借几十年的丰富经验和所拥有的多种高性能传感器活跃在这一领域前端。TrimbleMX9提供非常高的点云密度,扫描速度高达500次/秒。此外,还可以以高达110/kmh的速度采集全方位图像。
在本案例中,来自Trimble MX9的LiDAR点云数据在eCognition软件中进行处理,从而提取各种街景特征。该案例不仅展示了Trimble MX9的高质量,还展示了eCognition软件强大的多功能性。该软件可以通过自动化规则集,通过简单几个步骤将此类数据转换为有价值的移动测绘成果。
eCognition是全球第一个基于面向对象的影像分析软件,由39岁获得诺贝尔物理学奖(1986年)的Gerd Binning(戈尔德·宾宁)教授首创。eCognition软件的诞生引领了图像处理技术的创新和发展,成为国际上信息提取和影像解译分析技术的主流,为业界领先的数据提供者、产品增值者以及遥感专家提供解决方案。
eCognition的面向对象的影像分析方式可充分利用已有的矢量、栅格、DEM、点云等数据信息,对所有类型的常用影像数据源进行智能高效的解译,如低、中、高空间分辨率的卫星数据、高到超高分辨率的航空影像、机载/车载LiDAR和高光谱数据。
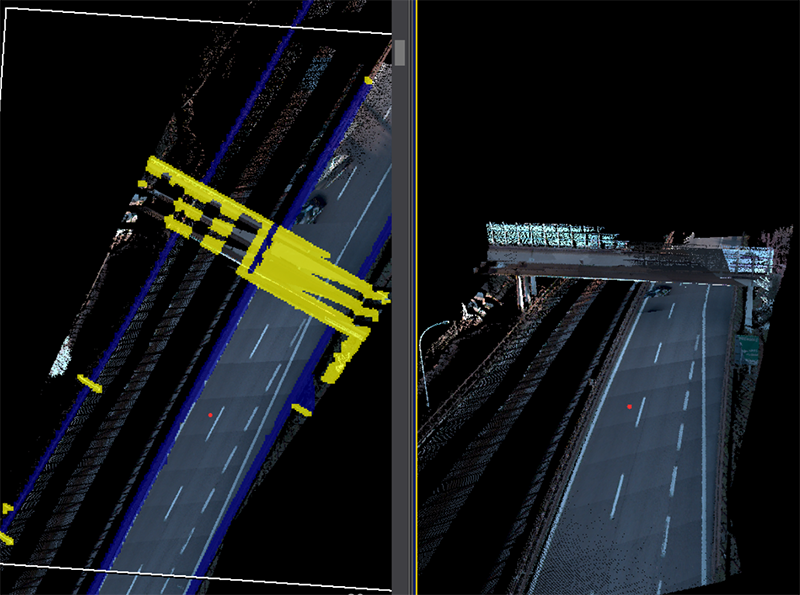
在本案例中,我们正在探索路标、护栏和人行道标记的提取潜力。为此,对导入的数据应用了特征提取模板,使分析重点放在道路上,而不是周围的区域。
.las文件连同表示模板区域范围的矢量图层(.shp)一起被直接导入到eCognition Developer 10软件中,以便仅对区域内的点云元素进行分类。
eCognition的第一步是调整地图分辨率,以支持点云特征的更高分辨率栅格化。在eCognition中,用户可以通过栅格化点云算法生成一系列栅格图层,例如强度和高度。
最初,从点云派生出两个栅格图层:一个使用最大Z值(生成DSM),另一个使用最小Z值(创建DTM)。随后,DTM和DSM层用作NDSM层计算算法的输入——NDSM是标准化数字表面模型,表示像素距地面的高度。然后将该层用作分割的输入,从而使用高度属性和形状对生成的物体进行分类,进而得出两类物体的识别:护栏和标志。
为了识别路面标记,首先使用自动点云分类算法,该算法支持大约10个类别。通过第一个分类,可以清楚地区分道路的一些元素,包括水平标志。
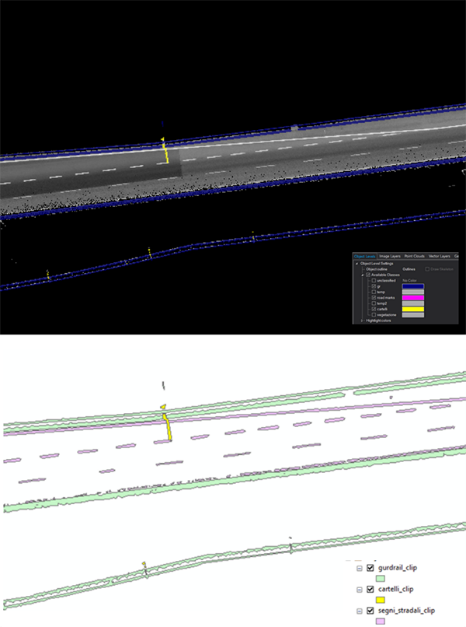
尽管自动分类结果很精确,但仍存在一些需要额外注意的点。因此,使用强度属性对分类为路面标记的点云部分进行栅格化,生成所谓的强度层,可以与eCognition的深度OBIA工具结合使用。然后将分割应用于该层,从而可以更好地定义“标志类别”。
最终结果非常好,而且该方法是全自动的,无需任何手动编辑。特征提取的准确率高达86%——将使用eCognition获得的自动化结果与原始点云中手动识别的对象进行比较,计算的准确性同时考虑了数据丢失的区域。
该规则集已针对性能进行了优化——处理整个点云(约5000万个点,文件大小为1.8GB)仅需10分钟。
这是eCognition灵活性以及如何自动提取此类GIS/资产监控功能的绝佳示例。