

伴随着人类现代化文明的跨越式发展,机器人已被应用到我们日常生活中的各个领域,机器人的制造与使用也相应有了更高的需求。目前,机器人作业正向着高精度应用的方向发展,诸如自学习、视觉控制、仿真离线编程取代示教编程,这些都对机器人位姿准确度提出了更高要求。而医疗机器人,尤其是手术机器人(如针持、抓取钳、手术剪、穿刺针、钻头等),作为机器人领域中的尖端产品,其精度要求可称之为严苛;因此,对医疗机器人的检测就变得十分重要。目前,对医疗机器人,通常采用YY/T1712-2021标准进行检测。
本文所述的医疗机器人,是由数个刚性杆体和旋转或移动的关节连接而成,是一个开环关节链;开链的一端固接在基座上,另一端是自由的,安装着末端执行器。在操作时,机器人手臂前端的末端执行器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动合成的。由于机器人机械手的惯性力、和重力负载都随运动空间的变化而变化,因此要保证机器人的高精度、高速度、高动态品质,就需要对机器人的性能进行检测,来评估机器人的各项指标。
图1:Radian激光跟踪仪标定机器人作业中(右)&数据报告(左)
根据YY/T1712-2021行业标准、并参考ISO9283标准,API开发了一套针对医疗机器人各个性能的、有效的评估检测方案,其中包括:位姿准确度和重复性检测、多方向位姿准确度变动、距离准确度和重复性、位置稳定时间和超调量、位姿漂移特征、互换性、轨迹准确度和重复性、重定向轨迹准确度、拐角偏差、轨迹速度特征、最小定位时间、静态柔顺性、摆动偏差,这14项性能检测,都可以采用API品牌的Radian激光跟踪仪配合RMS软件来实现。
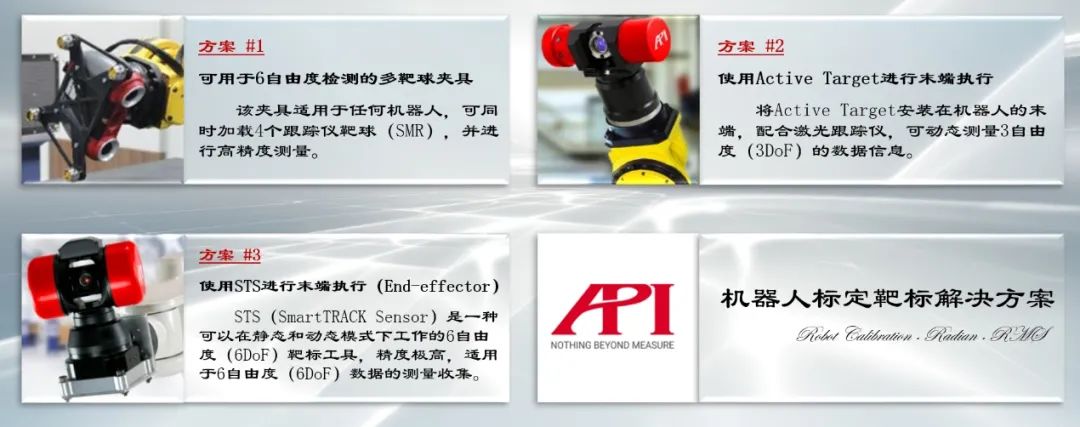
图2:固定于机器人末端的激光接收装置
图3:API品牌Radian系列激光跟踪仪
检测时,只需根据需求在机器人末端部署相应的激光接收装置(如图2),即可开启激光跟踪仪,并自动完成全套流程的检测与评估。 Radian激光跟踪仪会射出激光,并将激光锁定至固定在执行机构末端的靶球(或靶标)中心,医疗机器人在其运动范围内移动的同时,激光跟踪仪会实时记录下轨迹坐标,并反馈至PC中的RMS软件进行数据的分析及评估。 通过机器人真实运动位置与其理论位置相比较,即可得到运动的偏差,从而针对这些偏差进行补偿。 Radian激光跟踪仪拥有微米级别(1/1000mm)的测量精度、卓越的动态及静态测量性能、灵活的安装方式、便捷的人机交互……,Radian激光跟踪仪的应用,为高精尖医疗机器人的精度提供了强有力的保障。







自动 精密 创新