

工业机器人第七轴检测需求伴随着工业机器人技术的不断升级、以及功能的不断丰富,拥有更多的轴向,可以赋予机器人更多的灵活度,以及增加机器人的工作范围,现代工业机器人除了各旋转轴外,还增加了第七轴,也常被称为工业机器人的“行走系统”或“行走轴”。 工业机器人的第七轴通常是由导轨系统构成,采取地轴或天轴的方式,负载机器人或工作台,实现“行走”的功能。由于在整个系统中,第七轴处于较为“根基”的部位,并起到承载的作用,其制造和调整精度以及稳定性,就在一定程度上影响到整个机器人工作系统的工作精度和状态。 故而,对于工业机器人第七轴的制造和调整精度往往有着极高的标准,对其检测需求也非常严苛 – 需要使用微米级高精密检测手段,对其导轨的直线度、平行度,以及结合导轨间的高差进行综合评价,从而确保整套系统工作的流畅性和稳定性。

图1:Radian激光跟踪仪(从左至右为:Plus/Pro/Core型号)
激光跟踪仪导轨检测方案
激光跟踪仪,作为大尺寸精密测量的代表性仪器,已被越来越广泛地应用于各制造领域。其具有可以在大尺度范围内以微米级别的测量精度对待测目标实施3D/6D精准测量的检测能力,已在各制造领域的测量检测环节中得到充分验证。 激光跟踪仪对于导轨直线度、平行度的检测,快速高效。只需将其架设在待测导轨周边合适的位置,使用靶球配合其实现导轨数据的采集,即可在测量软件中自动分析出所需检测数据并出具报告。 测量时,操作者手持激光跟踪仪SMR靶球,跟踪仪会射出激光至靶球中心锁定并实时跟踪靶球位置;操作者使用靶球触碰待测位置并短暂停留,跟踪仪即会高速采集该点的空间位置坐标数据,并反馈至测量软件进行分析。 我们将结合本案例中,使用API品牌Radian激光跟踪仪对某型号工业机器人天轨进行检测和调整的应用实例图文,详细解析。

图2:Radian激光跟踪仪机器人天轨检测现场

图3:使用SMR靶球配合激光跟踪仪在天轨上采集数据Radian激光跟踪仪机器人天轨检测应用实例待测项目:机器人天轨直线度。 检测过程: 1、 对于导轨直线度的检测分析 ① 将Radian激光跟踪仪架设在作业合适位置并启动;② 操作者使用跟踪仪SMR靶球沿导轨依次在预先计划的采集位置进行触碰并做短暂停留(请参考图3示意);③ Radian激光跟踪仪在靶球稳定停留间隙,以1000Hz(1000点/秒)的采集速率高速采集该位置空间坐标三维数据;④ Radian跟踪仪将数据快速发送至位于笔记本电脑端的测量软件,保存并实时在界面上显示;⑤ 待所有位置的点的空间坐标采集完毕,即可在软件中,使用这些点构建理论直线,并以直线为基准计算分析出导轨直线度误差偏差;⑥ 检测天轨高低方向直线度时,可在导轨下方平面采集数据进行分析(请参考图4示意);⑦ 检测天轨水平方向直线度时,可在导轨侧面采集数据进行分析(请参考图5示意)。
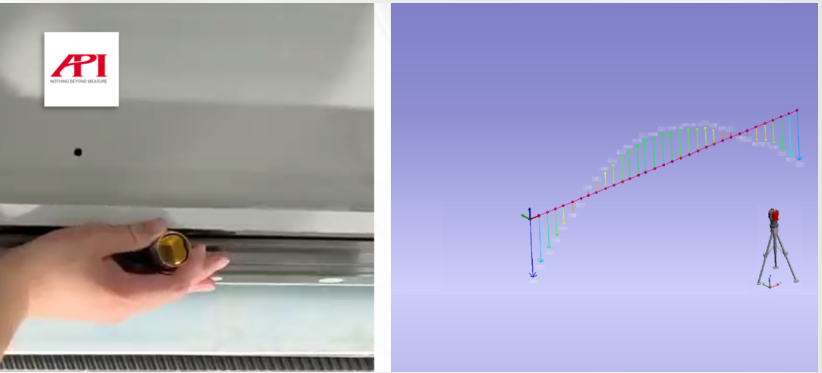
图4:高低方向直线度数据现场采集(左)&软件分析(右)
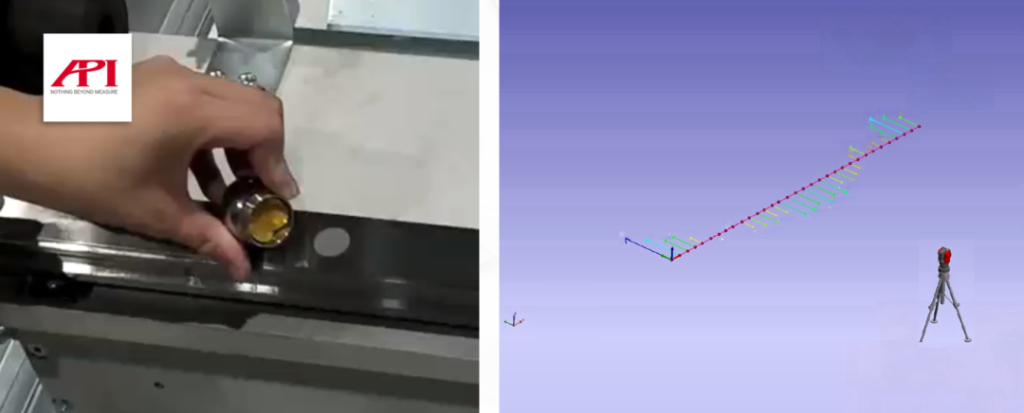
图5:水平方向直线度数据现场采集(左)&软件分析(右)
结论
使用Radian激光跟踪仪实施对机器人导轨的检测,精准、高效!