
为了确保成品的功能,工业中常常会在零件加工完成后进行装配实验,即:用专用的工装固定产品装配的位置,并在此状态下进行测量。如果这时的测量结果是满足公差要求的,则可认为产品合格。
然而,这种方法的弊端明显,即:为了保证能够在产品装配的位置进行固定,需要设计并制造相应的工装夹具。这意味着,一次装夹就要需要设计至少两个工装夹具,大大提高了生产成本。
但是不必担心,GOM Volume Inspect Pro的De-Warp(去翘曲)软件包以及更高级的Virtual Clamping(虚拟装配)软件包可以帮你轻松解决这一难题。他们可以精确地模拟真实装配结果,使您第一时间了解装配的成品是否合格。
虚拟装配是指根据产品的形变模型,研究实际网格在超静定状态(自由度被过限定)下的形变情况。这里先对使用De-Warp软件包进行虚拟装配进行讨论。
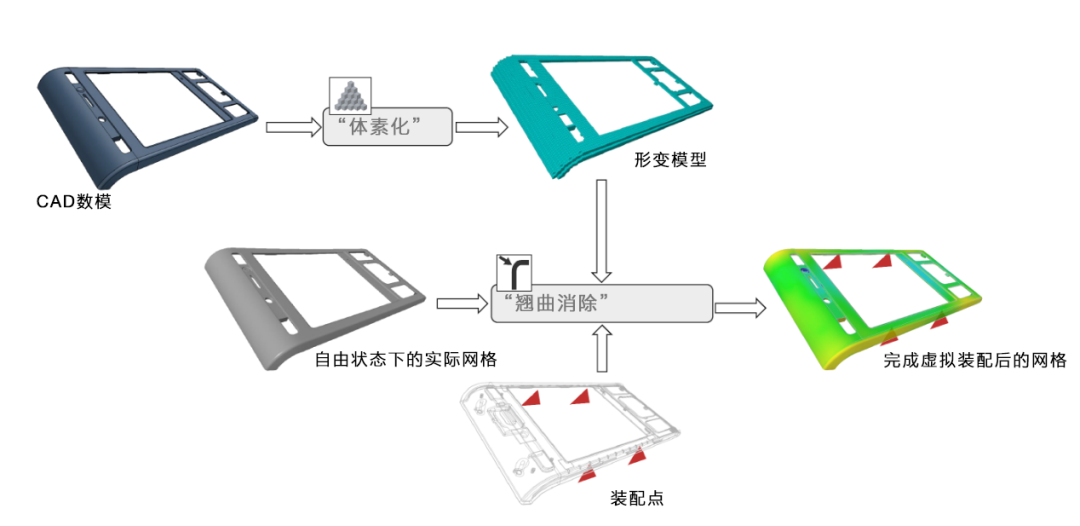
De-Warp软件包具体分为“体素化”和“翘曲消除”两个脚本。“体素化”以体素*的形式对体积进行离散化处理,并结合用户输入的材料属性(如杨氏模量,泊松比,密度等)建立出形变模型。
*体素:体积像素的简称,概念上可以理解为三维空间中的“像素”。
作为虚拟装配的核心内容,“翘曲消除”可根据形变模型,对齐方式,固定点和装配点的位置,推理出实际装配的情况。
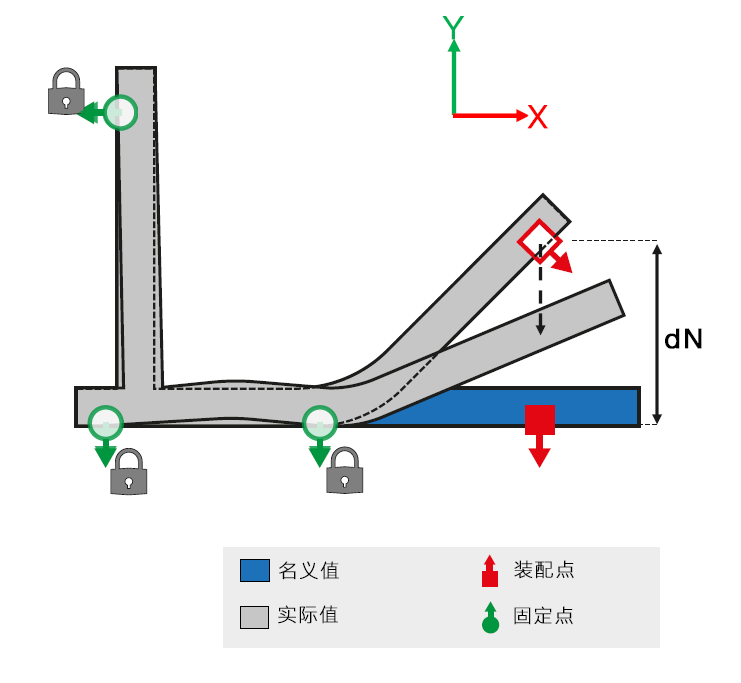
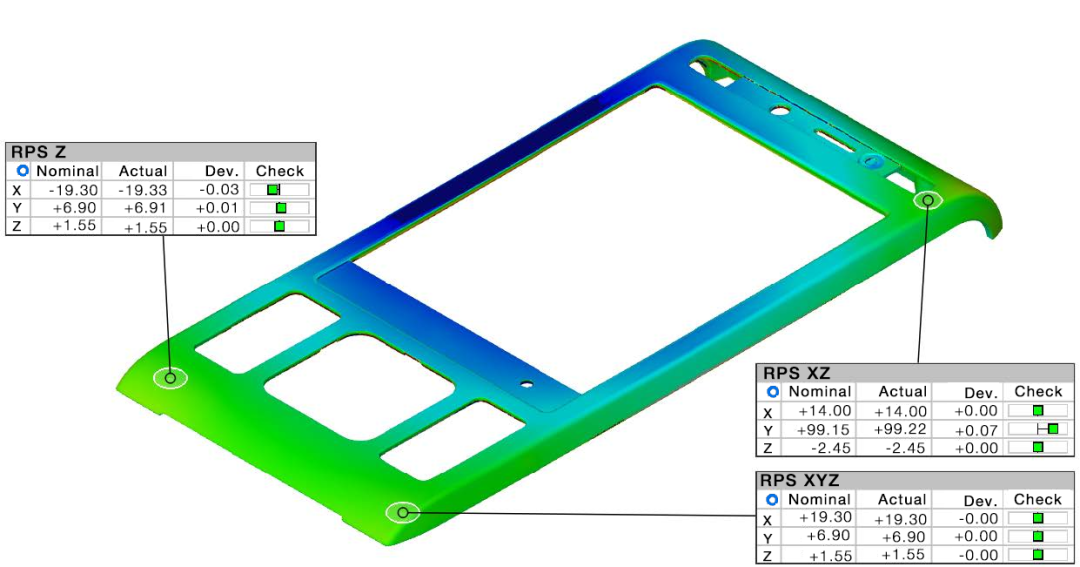
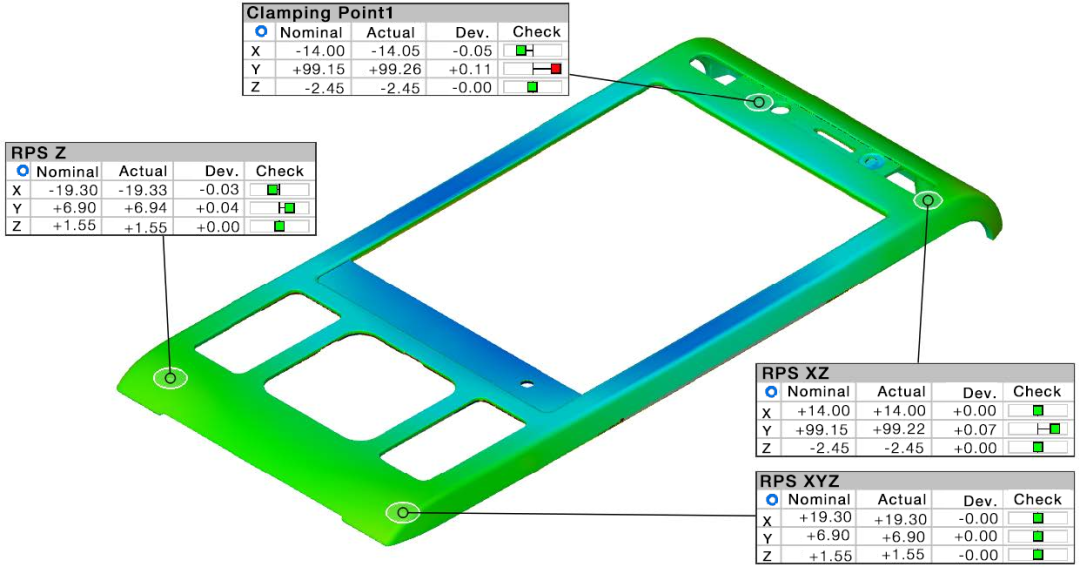
固定点的作用,顾名思义,是要在模拟过程中对网格进行固定,位置则通常取决于实际工装对产品进行夹持的位置,且一般与RPS坐标系中的点位保持一致。
装配点则是模拟装配的关键,它模拟的便是零件与零件间实际进行装配的位置,且在模拟过程中,软件试图使CAD与网格在装配点方向上尽可能贴合。
值得注意的是,在“翘曲消除”软件包里,装配点可以是多个,但模拟的必须是一次性装配(即在所有装配点位同时完成装夹)的过程。
如果在模拟形变时,使用单纯的RPS对齐最多可以将 6 个基准调整为零。
De-Warp软件包通过约束6个以上的基准实现真实装配状态的模拟。
下面通过一张流程图来概括“翘曲消除”的算法。

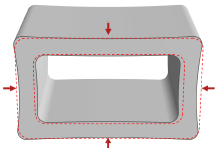
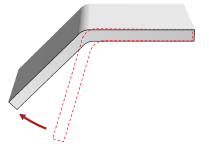
下图展示了两种翘曲消除的典型情况:


那么,之前提到的“虚拟装配”软件包比“翘曲消除”多了哪些功能呢?
例如:
•可对非刚性件进行重力补偿;
•更改装配顺序,即可以实现分步装配;
•编辑诸如迭代公差、迭代次数等专业人员参数;
当您购买了“虚拟装配”的软件包许可后,还有更多功能等待您的探索。