

关键词:SLAM技术;地下工程建设;管廊、手持三维激光扫描仪
管廊、暗涵、隧道都是SLAM最难场景之一,地下管廊设施是建筑在城市地下,用于集中敷设电力、通信、广播电视、供水等市政管线的复杂公共隧道,因此地下管廊在整个城市当中扮演着非常重要的角色。
GoSLAM在应对该种场景具有完备的技术配套解决方案,可进一步保障城市活性运转以及民生问题,需要定期排查及扩大地下管廊空间,进一步提升城市品质,提高城市韧性。


在特殊环境的三维数字化中,为保证扫描精度,我们往往需要提前布设控制点,而在控制点的布设过程中我们也需要如图3-1所示的注意事项。
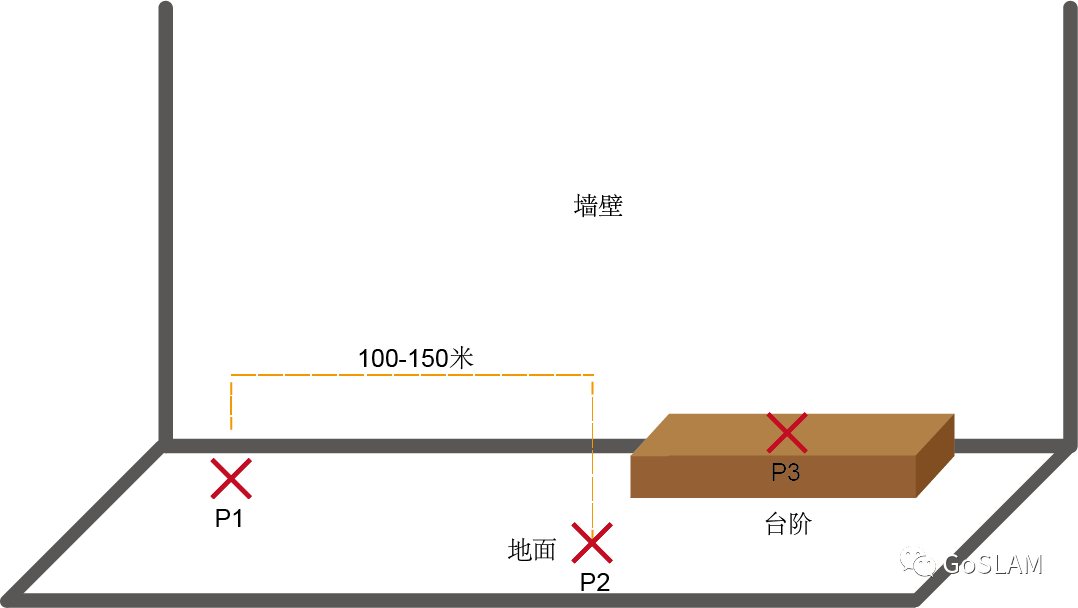
图3-1控制点布设图

- 对于单次扫描最少布设三个控制点。
- 多个控制点,不可处于同一条直线上。
- 为保证后期精度,三个控制点尽量不处于同一高程。
- 对于狭长的隧道等环境,两个控制点之间的间距应小于150米。
B:将设备进行正常开机,扫描过程中为保证扫描精度,设备在扫描过程中,在激光头扫描范围内不要存在人员,车辆移动。在通过门时,扫描之前提前打开所有通道的门,可以手持扫描仪进行倒退式扫描进出门,过渡过程中缓慢转身,保证扫描头在扫描过度区间既能保证扫描到室内特征又能扫描到室外特征。具体操作如图2-2所示:

图2-2进出门扫描技巧
以此些方式在扫描过程中依此获取全部控制点后即可完成此次扫描。

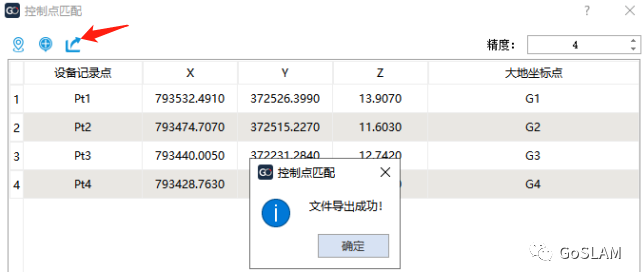
导入完成后将相对坐标点与绝对坐标点按照扫描顺序一一对应。(对应过程中需要主要扫描顺序,匹配对应错误可能会造成扫描点云数据后处理发生错乱。若一个绝对坐标点进行多次扫描,也可按照采集名称进行对应。)
以下数据是进行的一站式扫描,长度在四公里左右,打点方式是通过井口做点引到井底,然后在扫描过程中进行采集。
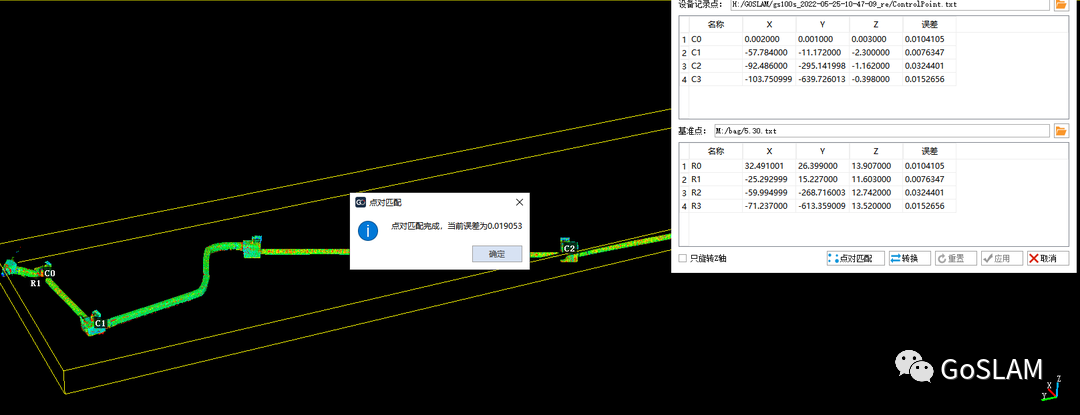
通过上图可以看出,使用全局控制功能进行数据采集,对于一个全长为四公里的狭窄空间地下涵洞进行三维数字化,可保证整体点精度为0.019米,完美实现了客户要求的整体误差控制在五公分以内。