 图1 码垛机器人
图1 码垛机器人
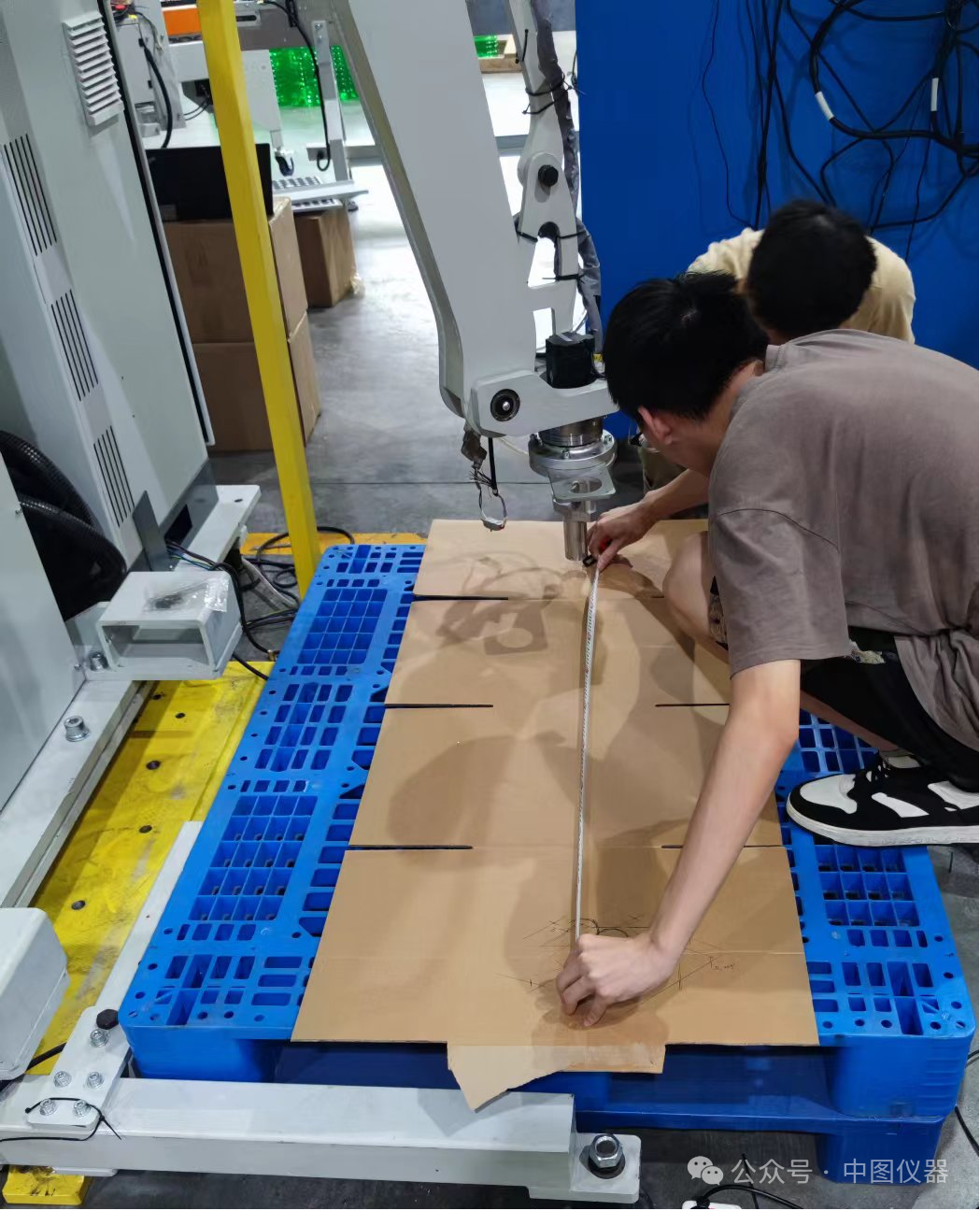 图2 传统方式测量机器人X向运动偏差
图2 传统方式测量机器人X向运动偏差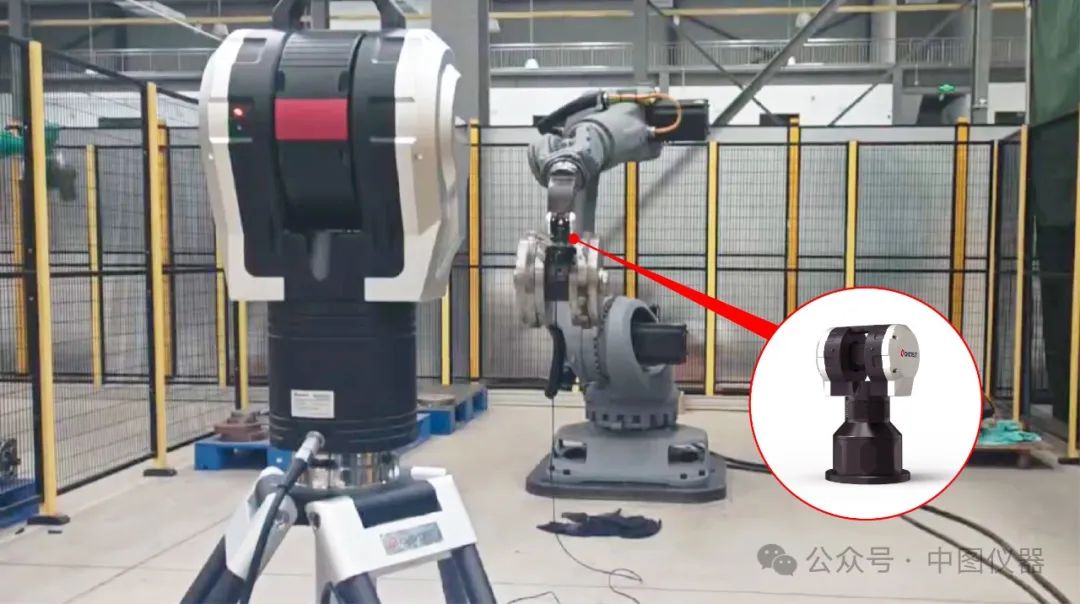 图3 使用六维姿态传感器测量机器人
图3 使用六维姿态传感器测量机器人
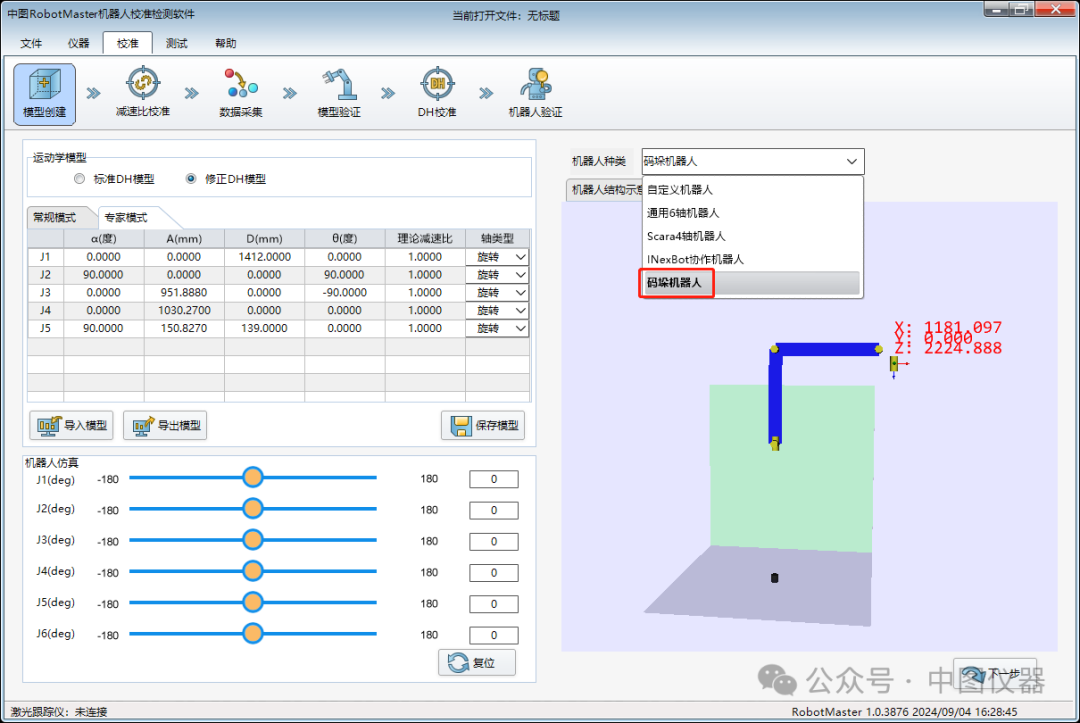 图4 码垛机器人DH模型
图4 码垛机器人DH模型
 图5 跟踪仪测量进行数据采集
图5 跟踪仪测量进行数据采集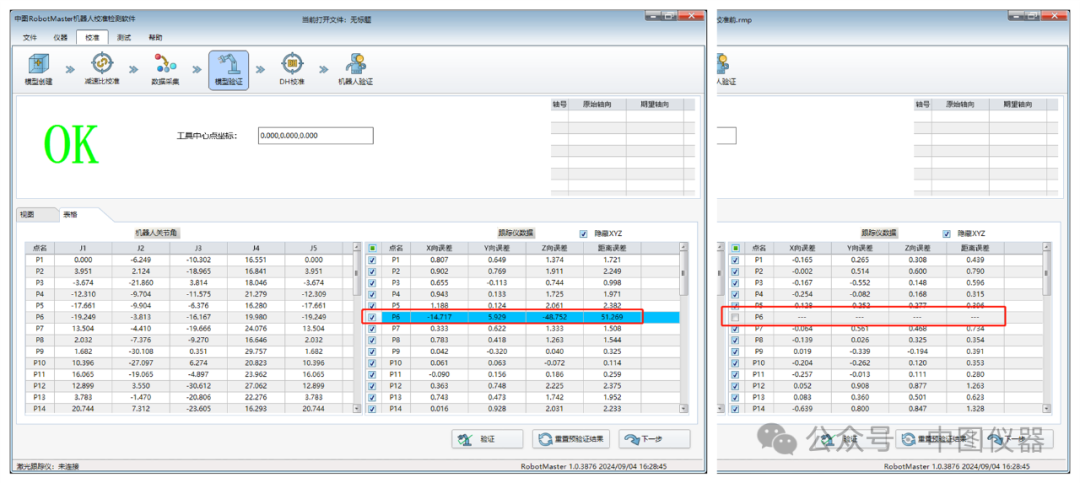 图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)
图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)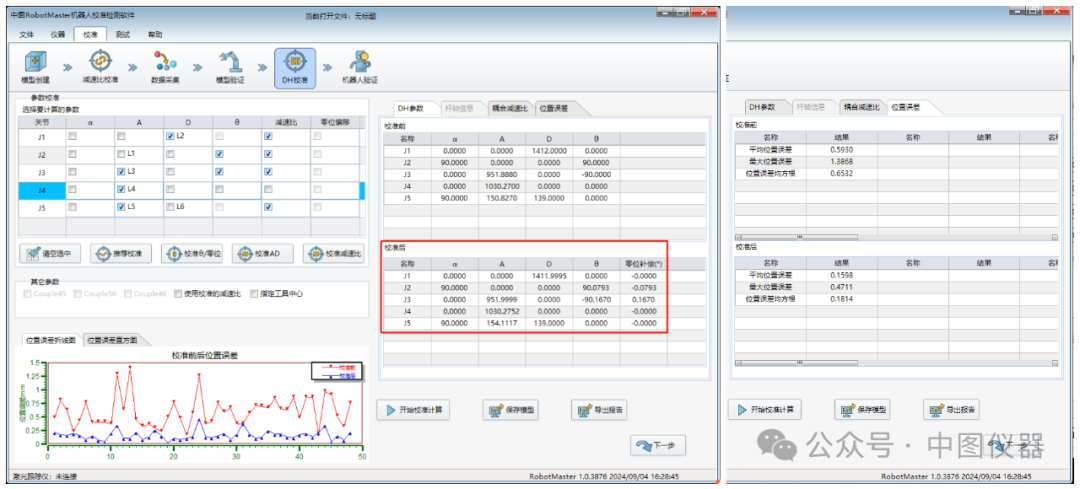 图7 DH模型校准(左)和去掉P6计算结果正常(右)
图7 DH模型校准(左)和去掉P6计算结果正常(右)
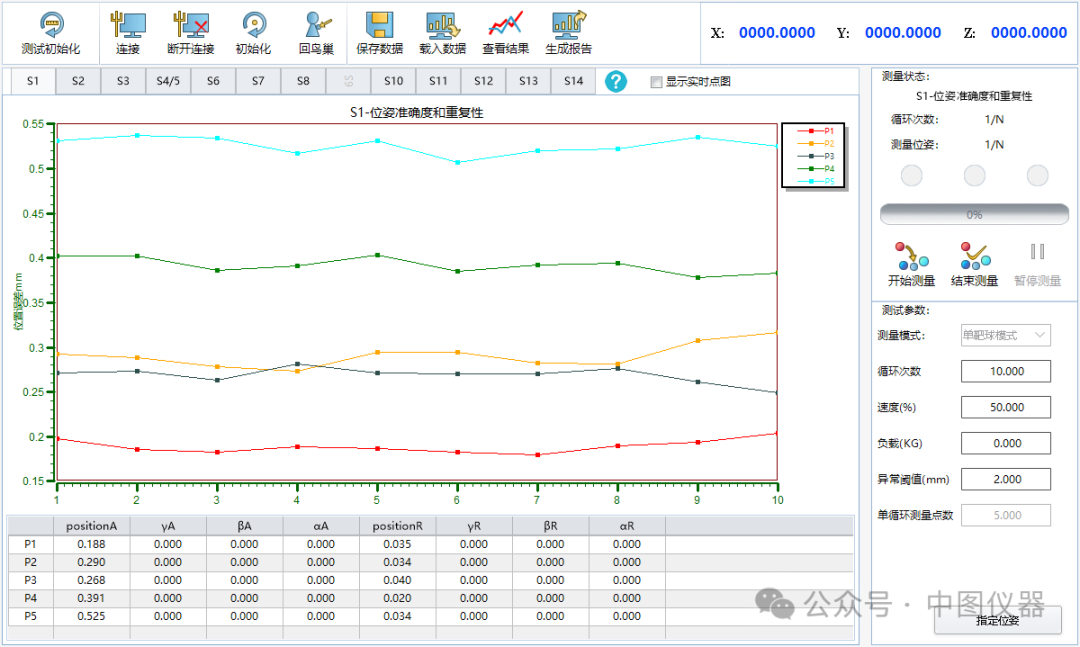 图8 位置准确度与重复性
图8 位置准确度与重复性推/荐/阅/读
Metrology-Trends.com

图1 码垛机器人
图2 传统方式测量机器人X向运动偏差图3 使用六维姿态传感器测量机器人图4 码垛机器人DH模型
图5 跟踪仪测量进行数据采集图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)图7 DH模型校准(左)和去掉P6计算结果正常(右)
图8 位置准确度与重复性推/荐/阅/读