

F. Englberger与George
Devol共同开发了一台名为Unimate的工业机器人,并应用于通用汽车的生产车间,完成捡拾、放置的重复工作,自此,工业机器人技术开始蓬勃发展,在工业生产领域代替人类完成很多繁重、重复的流程性作业。( 《中国制造2025 – 高档数控机床和机器人》,2018年5月,杨正泽,山东科学技术出版社。)
越来越多种类和功能的工业机器人,开始被设计制造出来并服务于人类的生产。
故而,对于工业机器人第七轴的制造和调整精度往往有着极高的标准,对其检测需求也非常严苛
– 需要使用微米级高精密检测手段,对其导轨的直线度、平行度,以及结合导轨间的高差进行综合评价,从而确保整套系统工作的流畅性和稳定性。

图1:Radian激光跟踪仪(从左至右:Plus/Pro/Core型号)
具体操作,我们将结合以下使用API品牌Radian激光跟踪仪对某型号工业机器人第七轴导轨进行检测和调整的应用实例图文,分步解析。

图2:Radian激光跟踪仪机器人导轨检测现场

图3:使用SMR靶球配合激光跟踪仪在导轨上采集数据
Radian激光跟踪仪工业机器人导轨检测应用实例
待测项目:
1.工业机器人导轨直线度;
2.两导轨的平行度;
检测过程:
⑦*检测导轨水平方向(YY)直线度时,可在导轨侧面采集数据进行分析(请参考图5示意)。
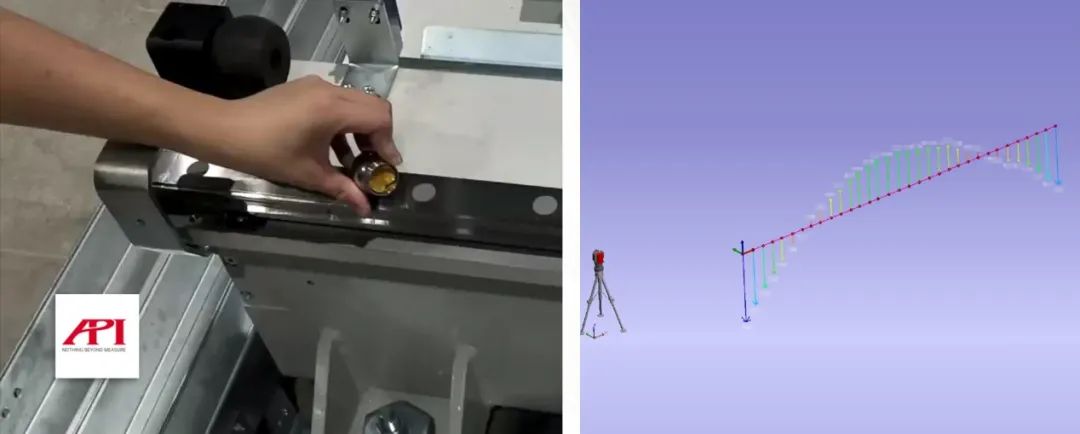
图4:高低方向直线度数据现场采集(左)&软件分析(右)
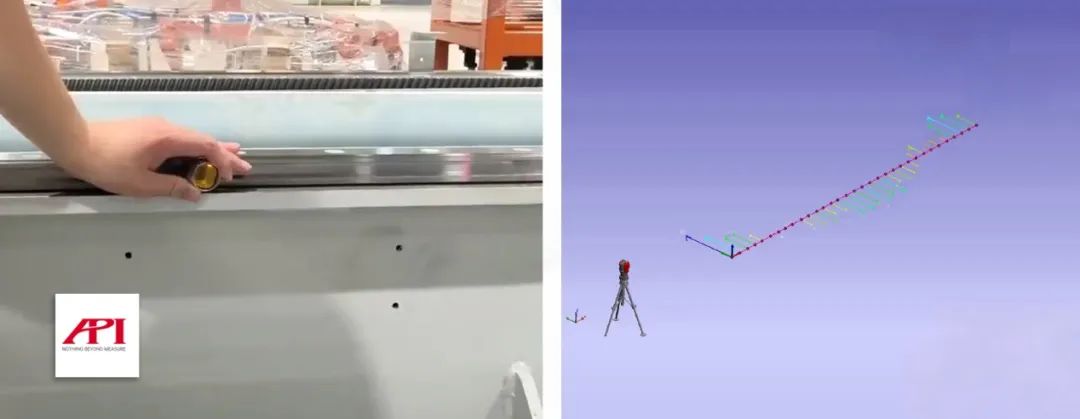
图5:水平方向直线度数据现场采集(左)&软件分析(右)
与导轨直线度的检测类似,依以上步骤分别采集两条导轨的数据,即可在软件中根据数据自动计算分析出两导轨间平行度的误差。
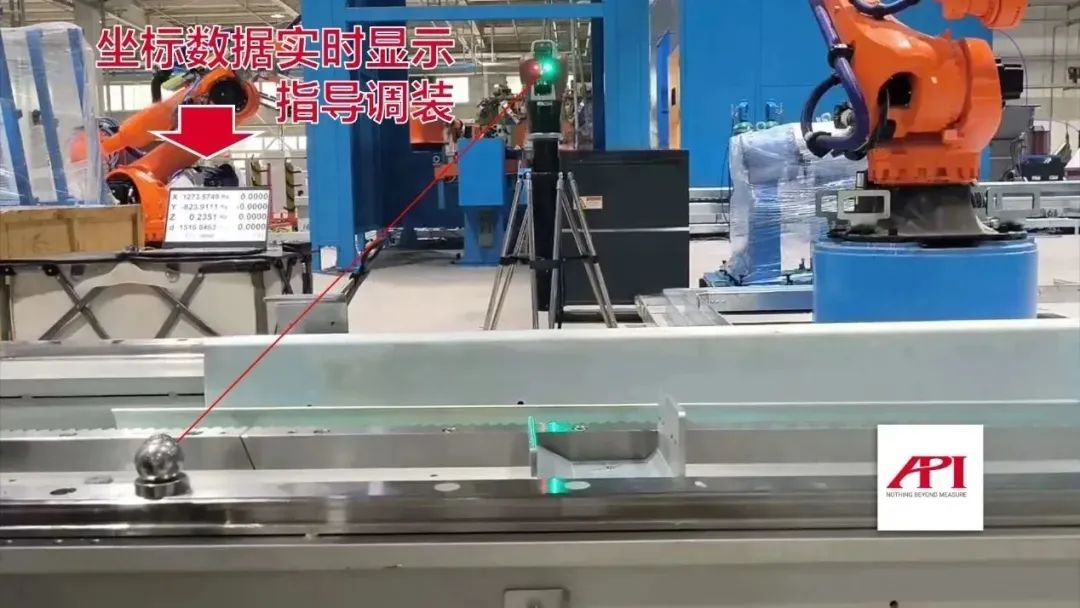
图6:调装功能应用现场
操作者可将靶球稳置于导轨后,呼出“调装”功能。此时,Radian激光跟踪仪可实时将靶球位置三维坐标通过人机交互界面传递给操作者,并根据设定的范围数据提示调整方向和幅值。(请参考图6示意)
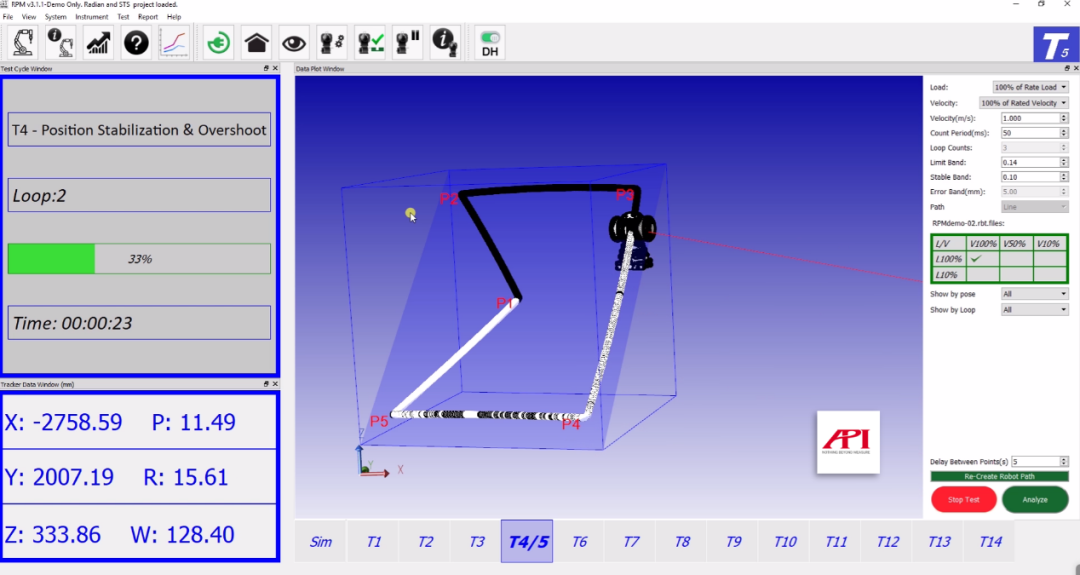
图7:使用跟踪仪配合API-RMS机器人测量软件对机器人性能指标进行测量分析
除本文案例中对机器人导轨进行检测评估外,Radian激光跟踪仪还可在机器人检测领域的更多环节得到应用,包括但不限于:位姿准确度和重复性检测、多方向位姿准确度变动、距离准确度和重复性、位置稳定时间和超调量、位姿漂移特征、互换性、轨迹准确度和重复性、重定向轨迹准确度、拐角偏差、轨迹速度特征、最小定位时间、静态柔顺性、摆动偏差等,亦可配合API-RMS机器人测量软件快速高效完成机器人的检测标定。

图8:API公司总部大楼(美国马里兰州罗克韦尔)