

在天宝,我们对产品以其在客户关心的环境中保证准确性、可靠性和效率而著称。我们的自动驾驶产品也不例外,一直以来保持着客户对天宝品牌所期望的高标准性能和安全性运行。
感知是自动驾驶的机器需要具备的基本能力,以便在可能遇到需要与之互动或避开障碍物的环境中运行。感知功能包括障碍物检测、测绘和定位。例如,农用设备可能需要与收割机或拖拉机编队行驶,自动压实机可能需要避开建筑工地上的铁塔和工人。感知功能依靠传感器实时获取车辆周围环境的信息。本文将重点讨论用于障碍物检测的传感器。不过,每个传感器的优缺点也适用于其他感知功能。
通过障碍物检测,机器可以感知周围的物体,从而就如何继续执行当前任务做出智能决策。障碍物检测系统的任务是提取三项信息:物体位置、物体类型和物体范围。图 1 显示了在光探测和测距(LiDAR)扫描中检测到的障碍物周围的三维边界框示例。在天宝,我们使用相机、无线电探测和测距雷达以及 LiDAR 来提取这些信息。
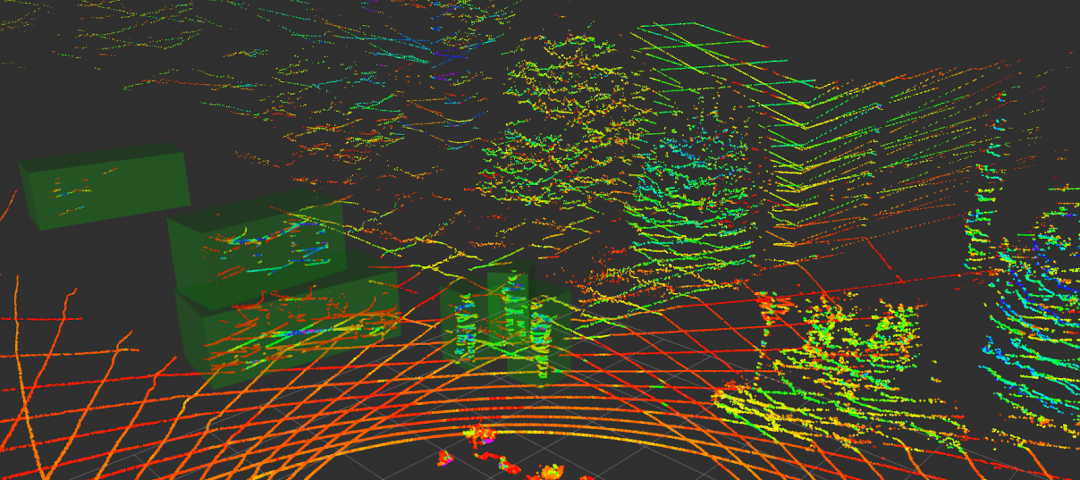
图 1:带有行人和车辆周围三维边界框的激光雷达扫描示例。
相机提供的高清图像可以让我们提取这些信息。然而,对于距离较远的物体,要估算出物体的度量尺度和距离是一项挑战。换句话说,我们可以计算出物体在图像中的位置和大小,但很难计算出物体在三维空间中的大小。相机还会受到光照条件和其他大颗粒遮挡物(如建筑工地上的灰尘)的影响。
雷达传感器通过发射和接收无线电波来获取环境中物体的三维位置和径向速度测量值。部署在自动驾驶系统上的雷达传感器通常是频率调制连续波(FMCW)雷达。无线电波的使用让雷达在各种天气和照明条件下都能不受遮挡物的影响。不过,雷达传感器无法提供与摄像头图像相同的细节。因此,即使我们能判断出有障碍物存在,也很难分辨出探测到的是哪种物体。对于图 2 所示的自动驾驶压路机等一些应用来说,压路机的工作空间通常是清晰无遮挡的,因此能够可靠地检测到障碍物——即使在没有其他传感器输入的情况下我们无法判断障碍物具体是什么——是具有巨大意义的。

图 2:在慕尼黑宝马展上,自动驾驶压路机为前方蹲下的人停车。
激光雷达介于两者之间。它以点云的形式对自动驾驶汽车周围的场景进行高精度测量。激光雷达的信息丰富程度不如照相机,但它可以直接测量距离,提供的细节比雷达多得多。正因为如此,它足以估算大多数物体在短距至中距内的三种属性。
每种传感器都有不同的优缺点。在天宝,我们从所有三种传感器的互补优势中获益,并根据客户应用的特定需求使用最佳工具组合。这使我们能够为客户提供各种机器类型、机具、操作领域等方面的支持。
最后一块拼图是数据。根据每个传感器提供的信息,现代物体检测方法依靠数据来 “学习 “不同物体的外观。由于天宝产品针对的应用范围比典型的自动驾驶汽车更广,因此我们致力于收集数据来训练我们的算法,使其在这些环境中表现出色,并验证它们是否达到了改变世界运行方式所需的准确性和安全性水平。