


在文章开始以前,小西向大家抛出一个问题:以上三种是什么型号?什么工作原理?
了解读码相机如何进行选型之前,首先需要知道读码器的工作原理。读码器主要分为三种:激光读码器,面阵相机读码器,线扫相机读码器。那本文将从一个小白的角度交流,帮助大家去了解读码器。
工作原理
1 激光读码器 SICK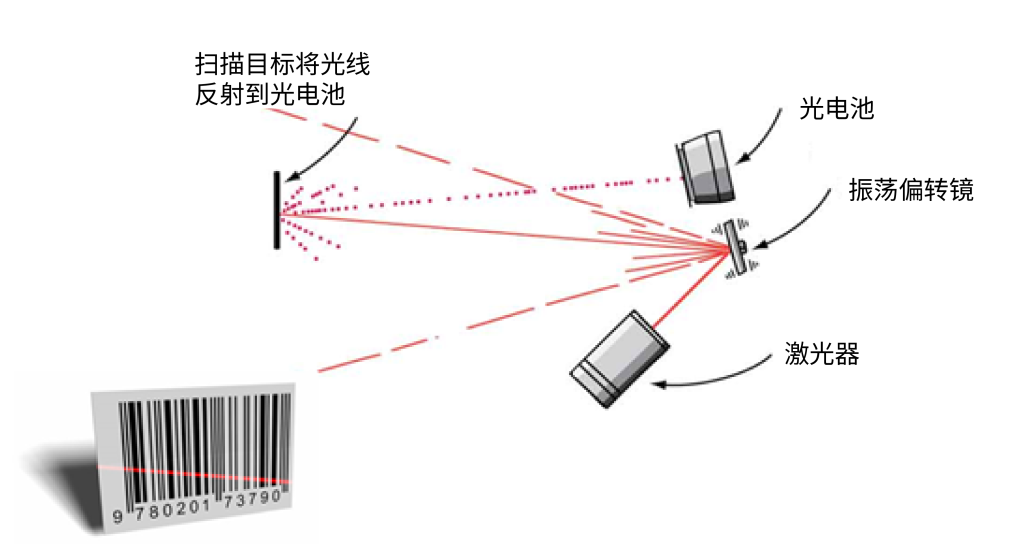

专业角度 SICK 一个或多个激光束指向条形码。通过使用振荡镜、镜轮或任何其他光学系统,光束被转换成扫描线。扫描线在高速下穿过条形码。不同粗细的光,经条形码的白条和黑条条反射回扫描器。反射被光学装置收集并转移到光电二极管上。光电二极管将反射转换成电信号
小白角度 SICK 打出一条激光线,一整个条码在激光下被横切完整,条码就会解码成功。
2 面阵相机读码器 SICK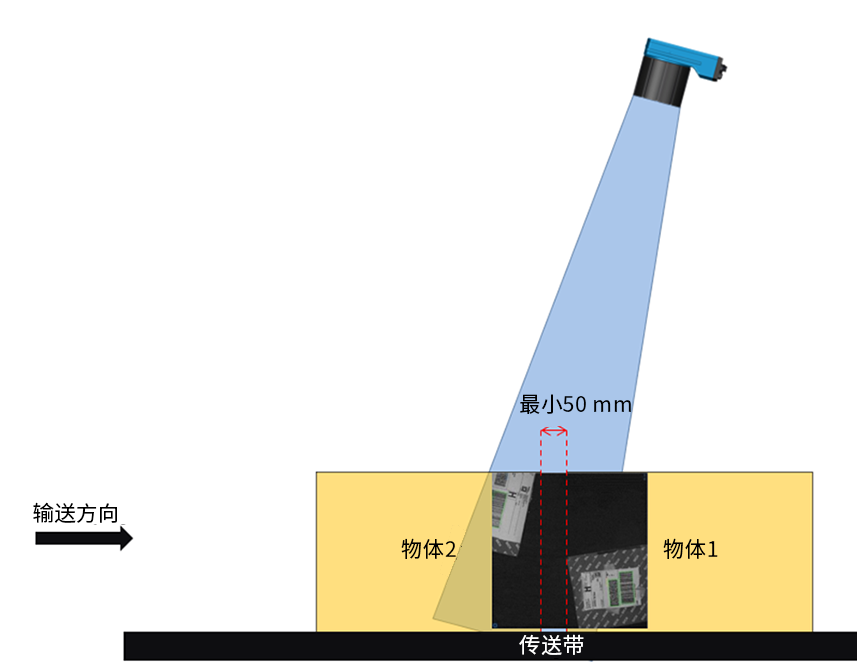

专业角度 SICK 主要分为四个步骤: ►图像传感器捕捉图像,光线通过镜头进入相机并照射到图像传感器上,每个像素都可以感知光线强度,并转换为电荷信号。 ►图像传感器将图像转换为数字信号,就是电荷信号被转换为数字信号,并被存储在相机的内存中。 ►图像处理和分析,数字信号被传输到相机的内置CPU中进行图像处理和分析。 ►数据输出,图像处理完成分析条码信息后,将条码信息转为为计算机所能读懂的语言将数据输出。
小白角度 SICK 相机如人眼一样,所见即所得。看到条码后,将条码解析得到我们所能读码的信息传输给到大脑,通过语言换算后给到另外的人。
3 线扫相机读码器 SICK 专业角度 SICK 线阵相机的工作原理可以概括为:通过对移动物体进行拍摄,然后将各个像素所采集到的光电信号转换为数字信号进行存储和处理,并最终生成一张常规的二维图像。在经过如下的2,3,4过程,进行数据提取。
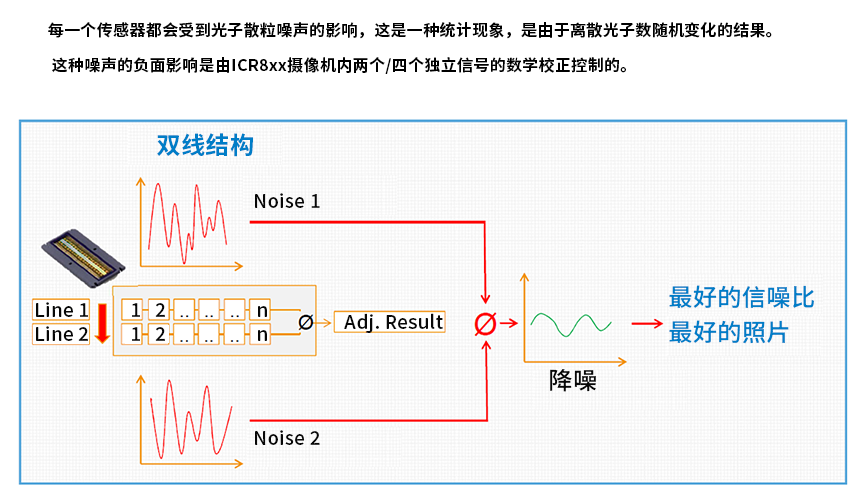
当然为了获得更高的图像质量,SICK会双线性结构或者四线性结构进行数据降噪。以此来获得更准确的真实数据,从而提取的图像质量更高。 小白角度 SICK 将眼睛眯成一条缝隙后,对当前物体进行匀速转动后,获得相应视觉信息。将所看见的拼接成一幅完整的图像进行理解分析,然后进行传输。
大家在这里是不是就有很快速的理解,发现激光和另外两种原理不同,面阵和线扫同样用眼睛来直观体现,它们都叫相机。那在这里我们就快速回答开头的第一个问题,以上三种是什么型号↓↓↓。 Clv系列 激光读码器 Lector系列 面阵相机读码器 ICR系列 线扫相机读码器


激光-面阵-线扫 读码器对比
注:以上只是SICK内部读码器对比
典型问题回复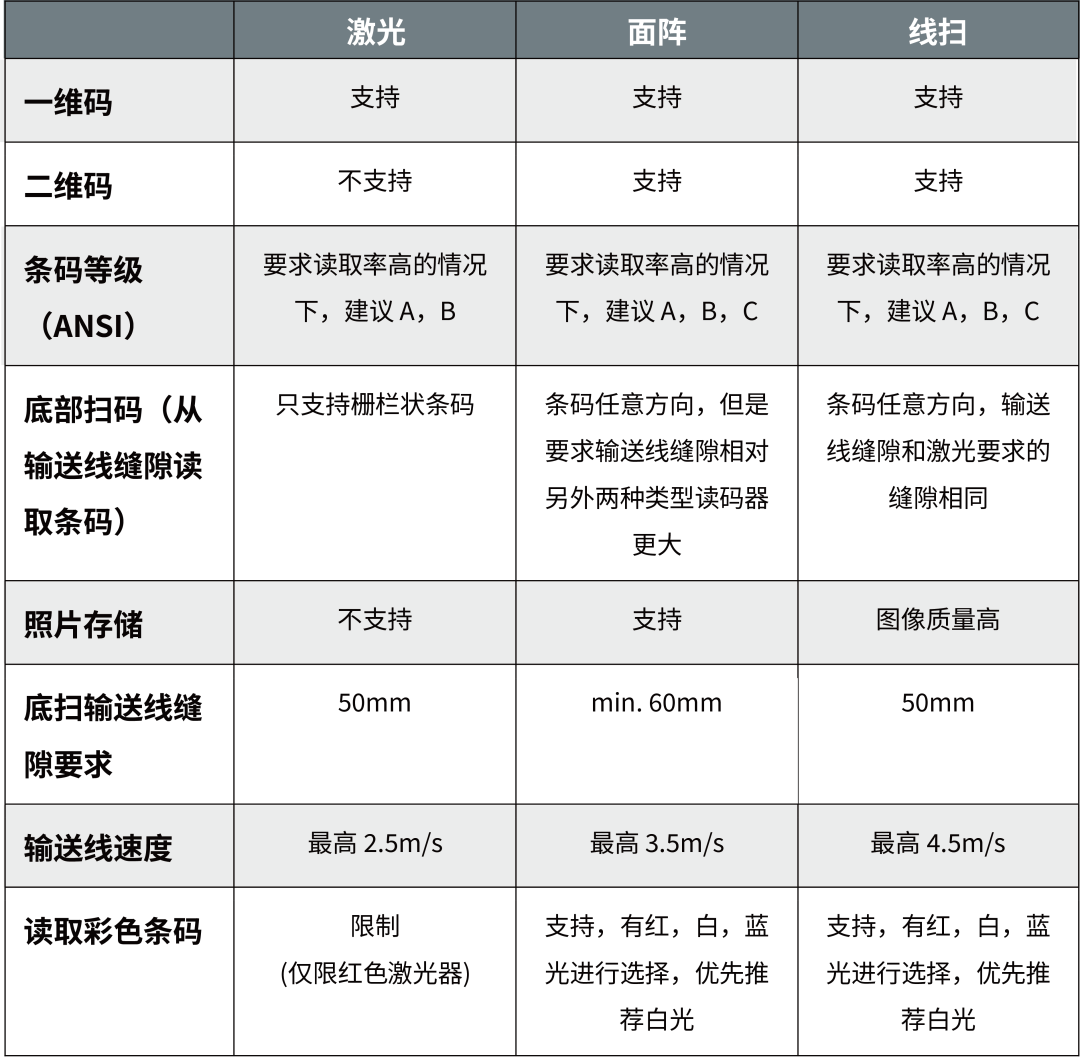
Q 激光读码器因为有偏振器在, 往往2-3年就会坏掉? A 目前在很多的轮胎厂和一些很早基建的机场依然在延续使用激光读码器。最长使用寿命已经达到10年以上,客户依然很信任激光读码器的工作稳定性。并且SICK有完善的质保和延保服务。
Q 当前项目只需要读取一维码,后续可能会拓展读取二维码,输送线速度1米每秒的单面读取,该如何选择读码器? A 该问题需要刨析为两个点进行回复,假设前提,激光和面阵相机的视野是相同的情况下。 ►如果预算有限,并且安装空间限制有限,条码贴在固定位置和固定方向,建议使用激光读码器。 ►因为需要考虑后续拓展为二维码读取,可以考虑面阵相机。并且优先推荐面阵相机读码器。
Q 输送线速度达到2.5m/s以上,并且是海外项目,多面扫读取。可以推荐使用什么类型读码器? A 可以考虑线扫相机: ►首先可支持速度高达4.5m/s。 ►其次海外项目SICK有完善的服务体现,并且线扫相机远程调试也更加方便。 ►最后多面读取的话,一个面只需要一台相机,可以更加便利的去帮助现场分析问题,而不需要查看多个相机的存储照片。
Q 简略概述线扫相机和面阵相机的优缺点? A ►线扫相机,适应输送线速度更高,视野和景深更大,读码过程只成像一张照片,但是读取贴在不规则的包裹条码相对能力稍弱于面阵相机。
►面阵相机,读码过程中,可连续拍照,在处理不规则的包裹条码有更好的读取效果。并且在读取C级别以下条码时,读取性能也会优于线扫相机。 但是,因为是连续拍照,因此在分析现场问题时,需要花费大量时间和经历去分析大量的照片。因为无法拍摄一张完整的包裹照片。

本次只是很粗浅的描述。希望后续有机会,我们再进一步的分析和探讨。
